Passageway
Intro to Architectural Robotics — MIT Architecture (IAP)
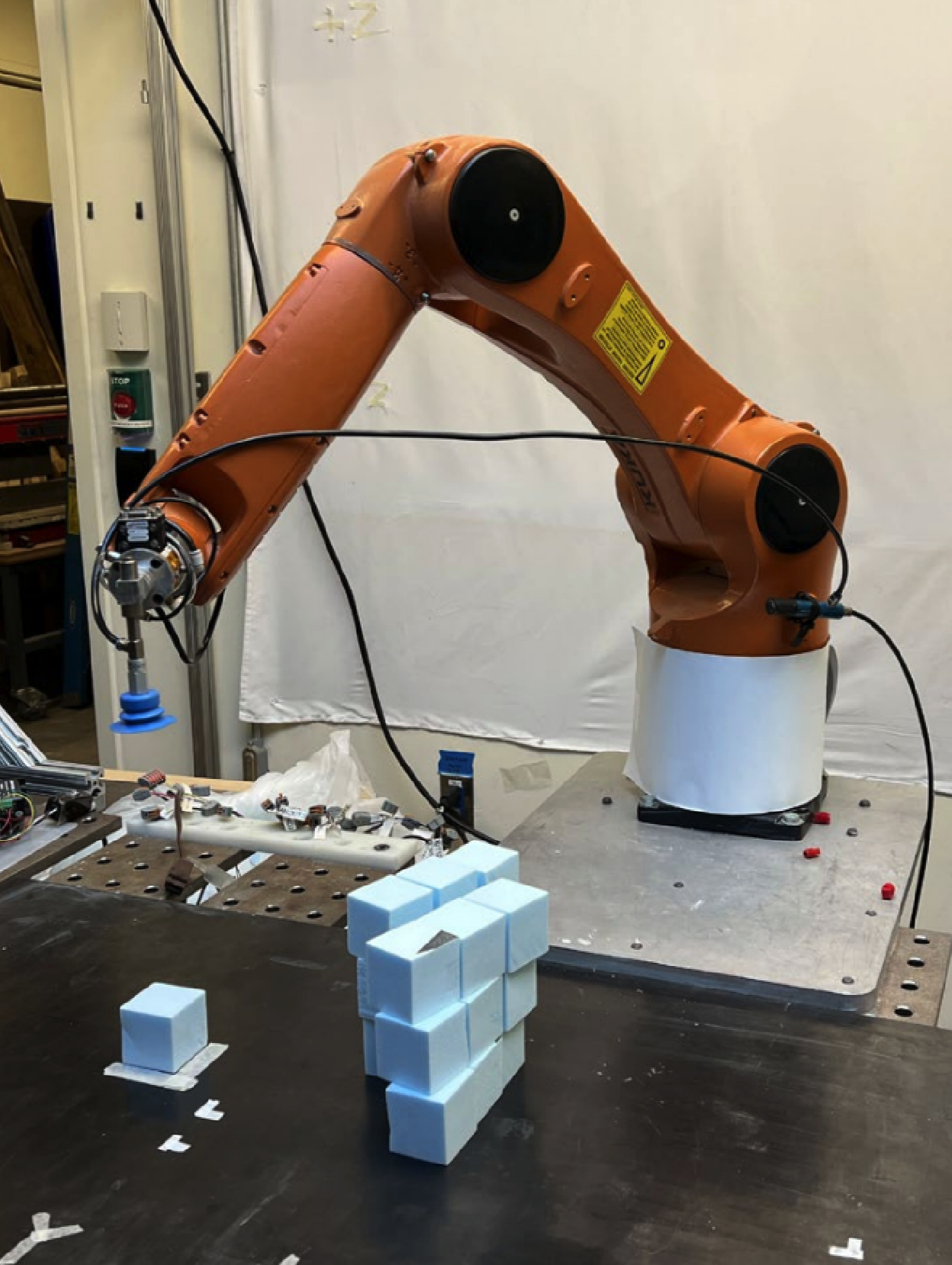
Passageway was developed during Intro to Architectural Robotics, a workshop at MIT Architecture that explores robotic fabrication through George Stiny's shape grammar formalism — a rule-based design schema. Working with a KUKA robotic arm and two-inch foam cubes, the project translates a simple rule-based design language into a robotically-assembled architectural structure.
Shape Grammar Rules
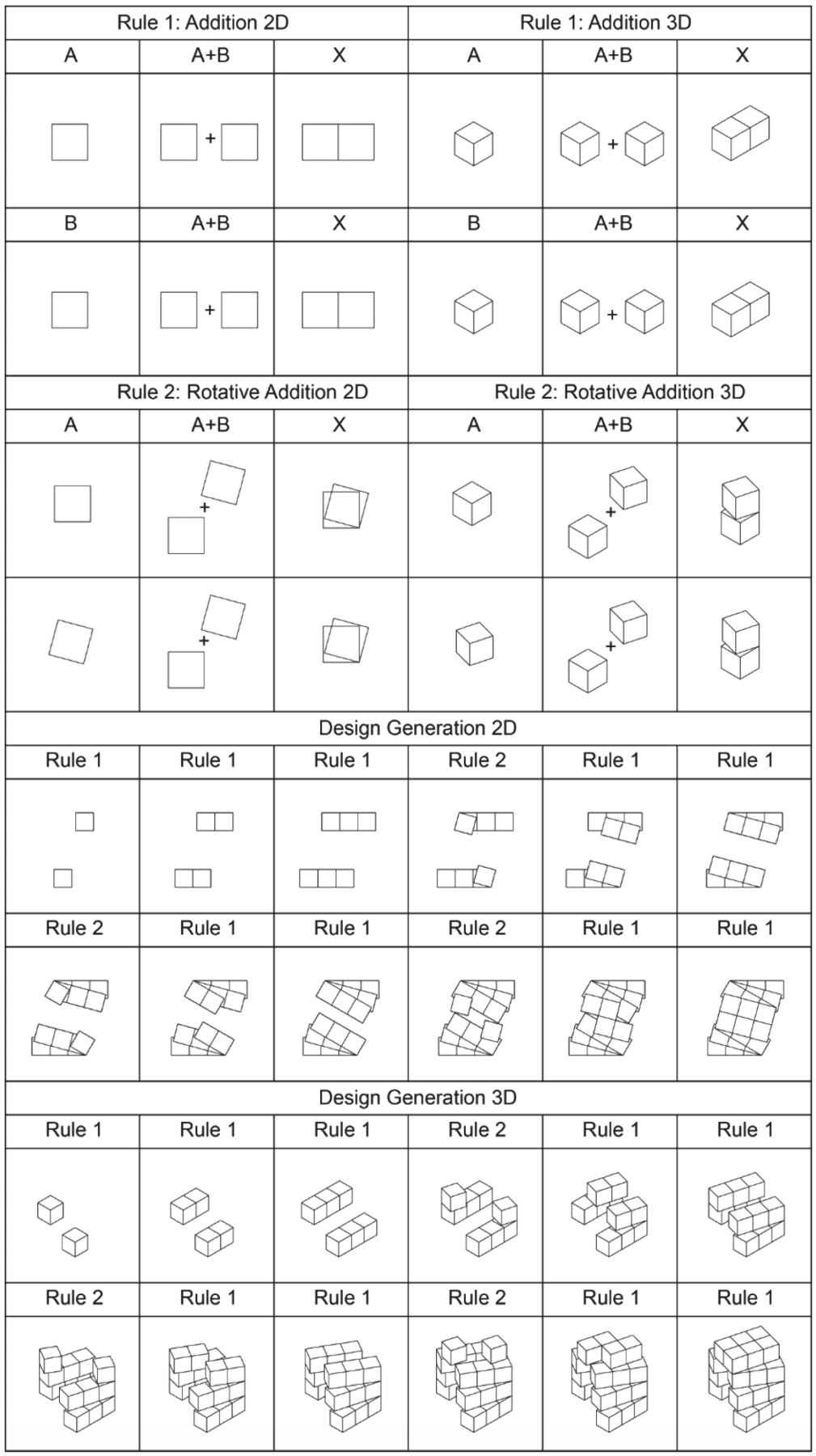
The design comprises two simple rules. The first rule places a cube parallel to another cube, while the second rule stacks a cube on top of another cube at an acute angle. From this minimal vocabulary, an entire language of structural forms emerges.
A Radially Curving Cantilever
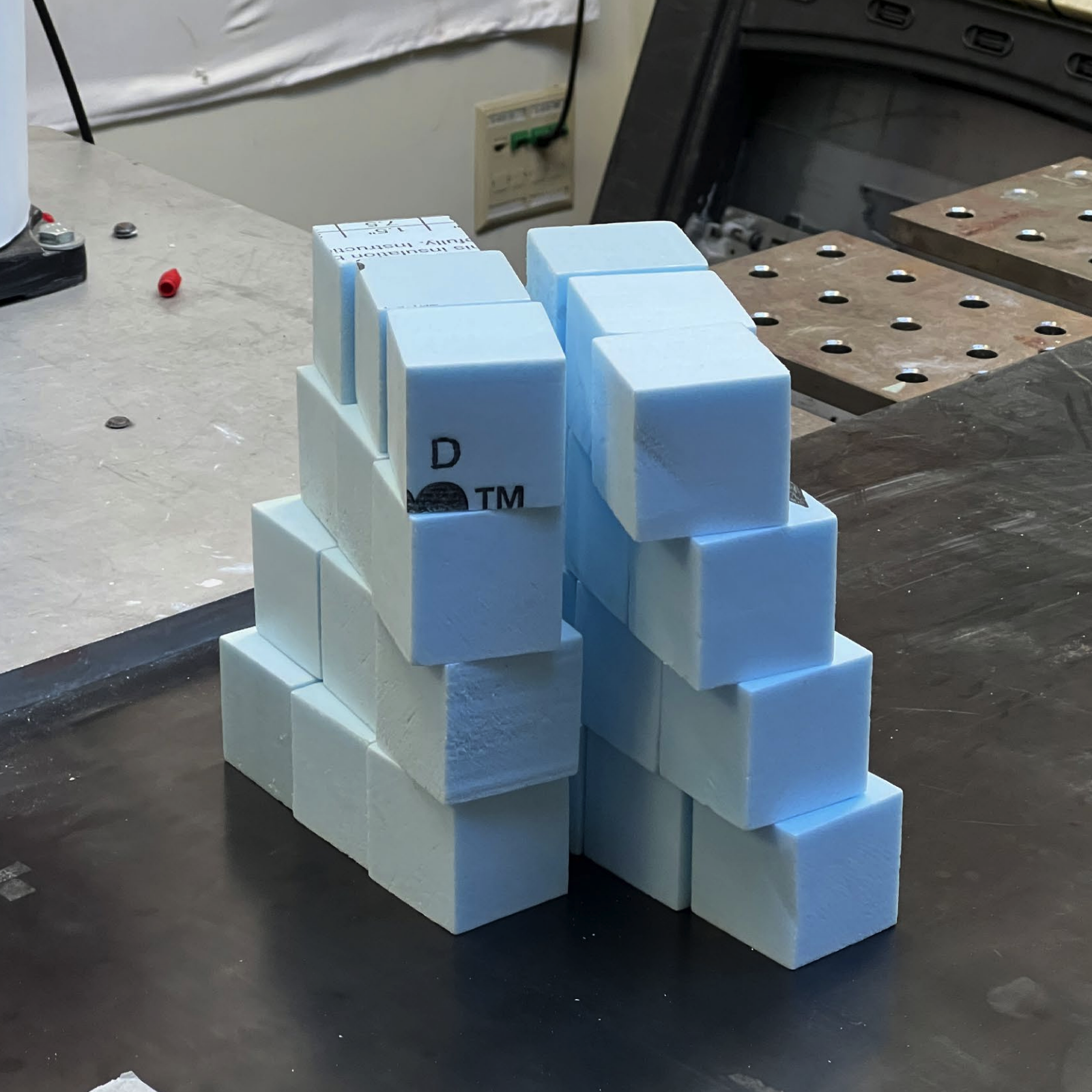
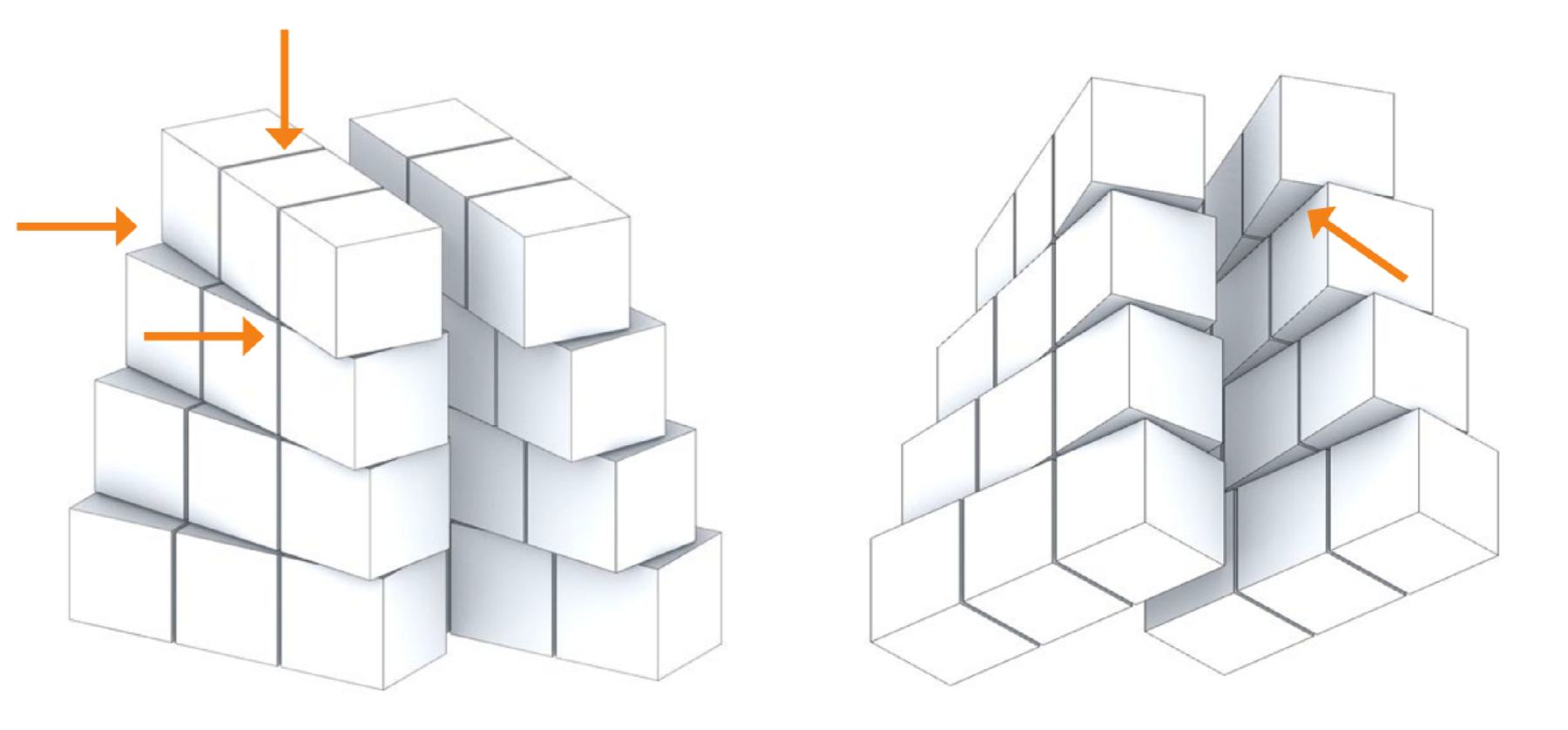
When the rules combine in the sequence 111211211211 — where 1 denotes the application of rule one and 2 denotes rule two — they create a cantilevered wall that radially curves. When a designer places two of these walls next to each other, an architectural space appears. A 2 mm gap between each cube works around the tolerances inherent to robotic assembly.
Physical-to-Digital-to-Robotic
The chief challenge in the robotic execution was designing the proper rotation angle employed in rule two. There is a direct relationship between the length of the wall and the rotational angle: a smaller angle creates a wall that spans longer without failing structurally, while a larger angle creates a shorter structure with more rotation and a more dynamic overhang.
Iterating through the physical-to-digital-to-robotic process, I found the proper rotation angle for the design while negotiating the volatile forces caused by the cantilever. Overcoming the issues of cantilever design, spatial-relationship tolerances, and material inaccuracies, the process produces a beautiful architectural space.